












公告
上了我的船就别想跑了哦,嘿嘿,其实给点好吃的马上请你参观
标签
站点统计
42
5
23
71,517
0 天
0 天前
0 字
1 分钟
现代控制理论-稳定性
ch6稳定性
稳定性的定义
李雅普诺夫意义下的稳定
系统 $\dot x=f(x,t)$,若存在状态 $x_e$ 满足 $\dot x_e\equiv 0$,则该状态为平衡状态
1.李氏意义下的稳定
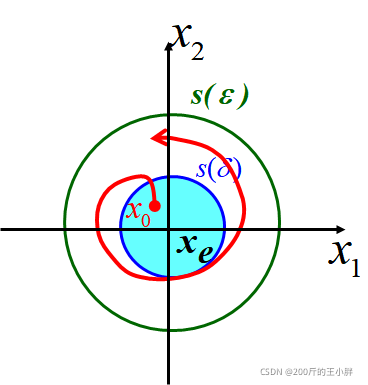
系统对于任意选定的实数 **$\varepsilon>0$** ,都存在一个实数 **$\delta>0$** ,当满足 $||x_0-x_e||\leq\delta$ 从任意 $x_0$ 出发的解都满足 $||\Phi-x_e||\leq\varepsilon$
则称平衡状态为李氏意义下的稳定
δ 收敛域(所能承受的最大干扰)
- 全局稳定
- 局部稳定
ε 稳定性指标
2.渐近稳定
解最终收敛于 $x_e$
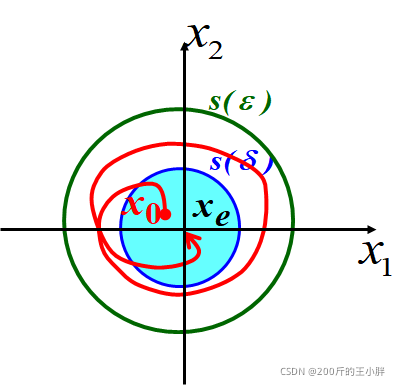
3.大范围渐近稳定
从状态空间中所有初始状态出发的轨线都具有渐近稳定性,称这种平衡状态 $x_e$ 为大范围内渐近稳定
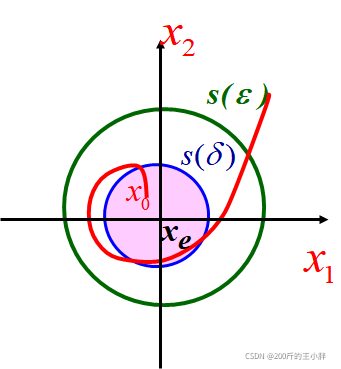
4.不稳定
不管 $\delta$ 有多小,只要由 $S(\delta)$ 内出发的状态轨迹超出 $S(\varepsilon)$ 以外,则称此平衡状态是不稳定的
现代控制理论-稳定性
https://www.ak12s.icu/posts/现代控制-稳定性/ 部分信息可能已经过时